高翔:视觉slam是什么?
坐标系,三角测量,PNP
EPNP算法原理
库说明:
- Eigen:几何模块
- Sophus:李代数模块 (在Eigen基础上开发)
- 优化库
- Ceres 库面向通用的最小二乘问题的求解,作为用户,我们需要做的就是定义优化问题,然后设置一些选项,输入进 Ceres 求解即可
- g2o是一个基于图优化的库(General Graphic Optimization)。为了使用 g2o,首先要做的是将问题抽象成图优化。这个过程中,只要记住节点为优化变量,边为误差项即可
第二讲
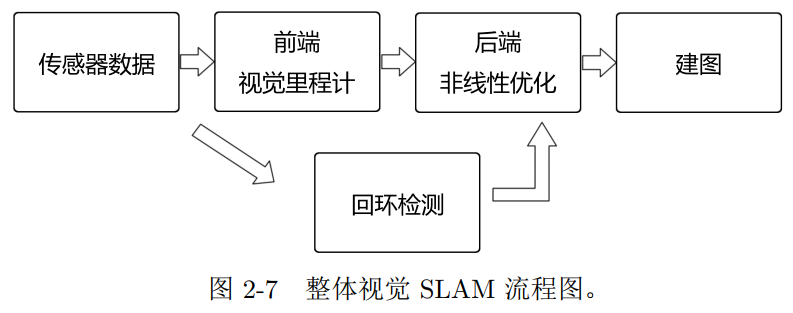
我们把整个视觉 SLAM 流程分为以下几步:
- 传感器信息读取。在视觉 SLAM 中主要为相机图像信息的读取和预处理。如果在机
器人中,还可能有码盘、惯性传感器等信息的读取和同步。 - 视觉里程计 (Visual Odometry, VO)。视觉里程计任务是估算相邻图像间相机的运动,
以及局部地图的样子。 VO 又称为前端(Front End)。- 视觉里程计关心相邻图像之间的相机运动,最简单的情况当然是两张图像之间的运动
关系
- 视觉里程计关心相邻图像之间的相机运动,最简单的情况当然是两张图像之间的运动
- 后端优化(Optimization)。后端接受不同时刻视觉里程计测量的相机位姿,以及回
环检测的信息,对它们进行优化,得到全局一致的轨迹和地图。由于接在 VO 之后,
又称为后端(Back End)。- 笼统地说,后端优化主要指处理 SLAM 过程中噪声的问题。后端优化要考虑的问题,
就是如何从这些带有噪声的数据中,估计整个系统的状态,以及这个状态估计的不确定性
有多大——这称为最大后验概率估计(Maximum-a-Posteriori, MAP)。这里的状态既包括
机器人自身的轨迹,也包含地图在视觉 SLAM 中,前端和计算机视觉研究领域更为相关,比如图像的特征提取与匹配等,后端则主要是滤波与非线性优化算法。
- 笼统地说,后端优化主要指处理 SLAM 过程中噪声的问题。后端优化要考虑的问题,
- 回环检测(Loop Closing)。回环检测判断机器人是否曾经到达过先前的位置。如果
检测到回环,它会把信息提供给后端进行处理。 - 建图(Mapping)。它根据估计的轨迹,建立与任务要求对应的地图
使用库
- 新建一个项目,名称为P1
- 在P1中新建一个类,名称为libSLAM
- 在libSLAM.h 中,声明printSLAM函数
```cpp
#ifndef P1_LIBSLAM_H
#define P1_LIBSLAM_H
class libSLAM {
public:
void printSLAM();
};
#endif //P1_LIBSLAM_H
```在libSLAM.cpp 中,实现printSLAM函数
#include "libSLAM.h" #include <iostream> using namespace std; void libSLAM::printSLAM(){ cout<<"Hello SLAM"<<endl; }- 在main文件的main函数(可以为任意文件名称中的任意函数,不一定为main)中,调用printSLAM
#include "libSLAM.h" int main() { libSLAM l; l.printSLAM(); return 0; }
- 修改cMakeLists文件的内容
cmake_minimum_required(VERSION 3.19)
project(P1)
set(CMAKE_CXX_STANDARD 14)
# 通过main.cpp生成可执行文件main
add_executable(main main.cpp)
# 通过libSLAM.cpp 生成库文件useLib
add_library(useLib libSLAM.cpp)
# 将可执行文件main链接到useLib静态库文件中
target_link_libraries(main useLib)其中,库文件分为静态库(以.a为后缀)和共享库(以.so为后缀)。静态库每次被调用都会生成一个副本,而共享库则只有一个副本,更省空间。cMakeLists中可以分别写为:
# (静态库) # 通过libSLAM.cpp 生成库文件useLib add_library(useLib libSLAM.cpp) # 将可执行文件main链接到useLib静态库文件中 target_link_libraries(main useLib) # (共享库) # 如果想生成共享库,则使用关键字 SHARED: add_library(useLib_Shared SHARED libSLAM.cpp) # 将共享库文件useLib_Shared链接到可执行文件main中 target_link_libraries(main useLib_Shared)如果只有头文件(e.g., Eigen库只有头文件),则不需要用
target_link_libraries将程序链接到库上,但需要在cMakeLists中添加include_directories("/usr/include/eigen3/")- (也可以写成
include_directories(${/usr/include/eigen3/})) - (可通过
locate eigen3查找相应位置) - 可以把头文件写到文件夹下,然后在CMakeLists.txt 中将其添加进去。比如在当前文件夹->includes->math文件夹(该文件夹中有一个头文件header_math.h),则CMakeLists.txt中添加
include_directories (includes/math)即可
- (也可以写成
find_package命令是cmake提供的寻找某个库的头文件与库文件的指令。如果 cmake能够找到它,就会提供头文件和库文件所在的目录的变量 (参考该链接)。在 Sophus 这个例子中,就是Sophus_INCLUDE_DIRS 和 Sophus_LIBRARIES 这两个变量。根据它们,我们就能将Sophus 库引入自己的 cmake 工程了:# 为使用 sophus ,需要使用 find_package 命令找到它 find_package( Sophus REQUIRED ) # 将头文件包含进去, 也可以写成 include_directories( "Sophus_INCLUDE_DIRS" ) include_directories( ${Sophus_INCLUDE_DIRS} ) add_executable( useSophus useSophus.cpp ) # useSophus 为主文件生成的执行文件 (类似于main.cpp的地位) target_link_libraries( useSophus Sophus::Sophus) # 将库文件上链接到执行文件中
Quick CMake tutorial及配套代码
CMakeLists.txt示例1
cmake_minimum_required(VERSION 2.8)
project(vo1)
set(CMAKE_BUILD_TYPE "Release")
add_definitions("-DENABLE_SSE")
set(CMAKE_CXX_FLAGS "-std=c++11 -O2 ${SSE_FLAGS} -msse4")
list(APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake)
find_package(OpenCV 3 REQUIRED)
find_package(G2O REQUIRED)
find_package(Sophus REQUIRED)
include_directories(
${OpenCV_INCLUDE_DIRS}
${G2O_INCLUDE_DIRS}
${Sophus_INCLUDE_DIRS}
"/usr/include/eigen3/"
)
add_executable(orb_cv orb_cv.cpp)
target_link_libraries(orb_cv ${OpenCV_LIBS})
add_executable(orb_self orb_self.cpp)
target_link_libraries(orb_self ${OpenCV_LIBS})
# add_executable( pose_estimation_2d2d pose_estimation_2d2d.cpp extra.cpp ) # use this if in OpenCV2
add_executable(pose_estimation_2d2d pose_estimation_2d2d.cpp)
target_link_libraries(pose_estimation_2d2d ${OpenCV_LIBS})
# # add_executable( triangulation triangulation.cpp extra.cpp) # use this if in opencv2
add_executable(triangulation triangulation.cpp)
target_link_libraries(triangulation ${OpenCV_LIBS})
add_executable(pose_estimation_3d2d pose_estimation_3d2d.cpp)
target_link_libraries(pose_estimation_3d2d
g2o_core g2o_stuff
${OpenCV_LIBS})
add_executable(pose_estimation_3d3d pose_estimation_3d3d.cpp)
target_link_libraries(pose_estimation_3d3d
g2o_core g2o_stuff
${OpenCV_LIBS})
CMakeLists.txt示例2
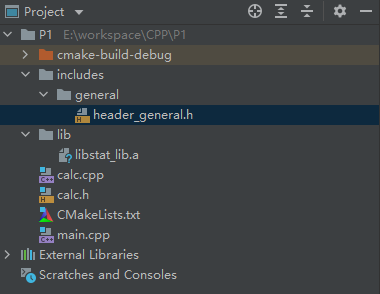
cmake_minimum_required(VERSION 3.19)
project(P1)
set(CMAKE_CXX_STANDARD 14)
#先建立两个可执行文件
add_executable(P1 main.cpp)
add_executable(P1_calc main.cpp calc.cpp)
#从calc.cpp中构建并增加静态库 (添加共享库的方式同理,关键词为SHARED)
add_library(stat_lib STATIC calc.cpp)
#将静态库连接到可执行文件中
find_library(SLIB stat_lib lib)
target_link_libraries(P1 LINK_PUBLIC ${SLIB})
# 添加自建的头文件库
include_directories(includes/general)
# 添加第三方的头文件或库文件,如OpenCV,Sophus等
# 为使用 sophus ,需要使用 find_package 命令找到它
find_package( Sophus REQUIRED )
# 将头文件包含进去, 也可以写成 include_directories( "Sophus_INCLUDE_DIRS" )
include_directories( ${Sophus_INCLUDE_DIRS} )
# 将库文件包含进去
add_executable(P1 main.cpp)
target_link_libraries(P1 Sophus::Sophus) # 将库文件上链接到执行文件中第三讲
内积和外积
- 向量内积外积的计算以及几何意义
- 内积的结果为一个数
- 内积(点乘)的几何意义包括:
- 表征或计算两个向量之间的夹角
- b向量在a向量方向上的投影
- 外积的结果为一个垂直于a,b向量所在平面的向量 (法向量方向)。大小为
|a||b|sin<a,b>,是两个向量张成的四边形的有向面积
- Eigen中几乎所有的数据都当做矩阵来处理。为使效率更高,需要指定矩阵的大小和类型
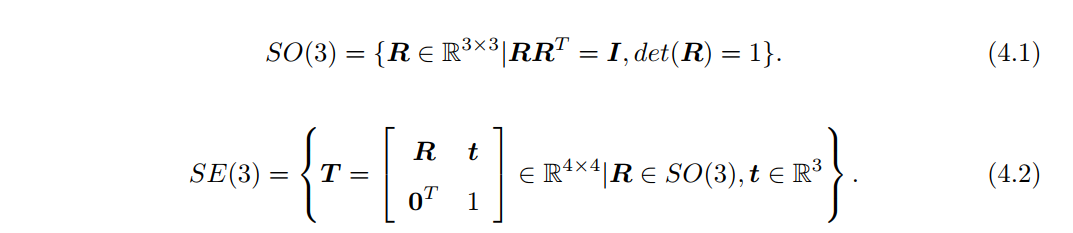
SO(n)和SE(n)
- so(n)是特殊正交群,这个集合由n维旋转空间矩阵组成
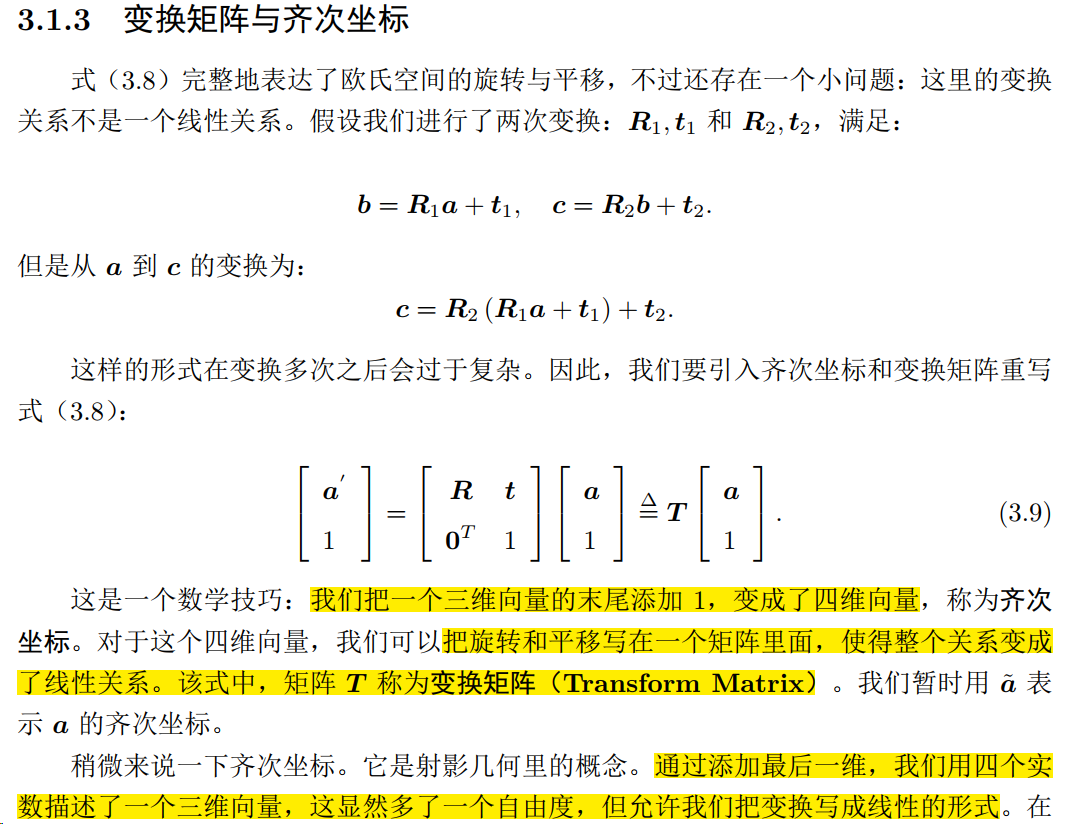
- 坐标系之间的运动由欧氏变换描述,它由平移和旋转组成。旋转可以由旋转矩阵
SO(3)描述,而平移直接由一个R^3向量描述。最后,如果将平移和旋转放在一个矩阵中,就形成了变换矩阵SE(3)。
旋转向量 (不紧凑)
由于上述的旋转矩阵和变换矩阵相对冗余,需要用更紧凑的方式表达旋转:旋转向量。而旋转向量和旋转矩阵之间可以相互转换
- 在对坐标系进行变换时,需要经过旋转和平移
- 任意旋转都可以用一个旋转轴和一个旋转角来刻画。于是,我们可以使用一个向量,其方向与旋转轴一致,而长度等于旋转角。这种向量,称为旋转向量(或轴角, AxisAngle)。这种表示法只需一个三维向量即可描述旋转。同样,对于变换矩阵,我们使用一个旋转向量和一个平移向量即可表达一次变换。这时的维数正好是六维(事实上,旋转向量就是我们下章准备介绍的李代数)
欧拉角 (有奇异性)
- 旋转向量和旋转角相对人类而言并不直观。而欧拉角提供了3个分离的转角来描述旋转,相对直观一些,但会陷入万向锁问题,使得系统丢失了一个自由度(由三次旋转变成了两次旋转),所以也很少在SLAM中直接使用欧拉角
四元数 (既紧凑,又没有奇异性)
- 一个四元数有一个实部和三个虚部。用四元数可以表示旋转
- 四元数可以与旋转向量、旋转矩阵之间进行转换
代码调试
- plotTrajectory.cpp
- 添加集合模块头文件
#include <Eigen/Geometry> - 将文件路径
./examples/trajectory.txt改为../../examples/trajectory.txt
- 添加集合模块头文件
- visualizeGeometry
- 若报错,重新编译一次pangolin即可
第四讲
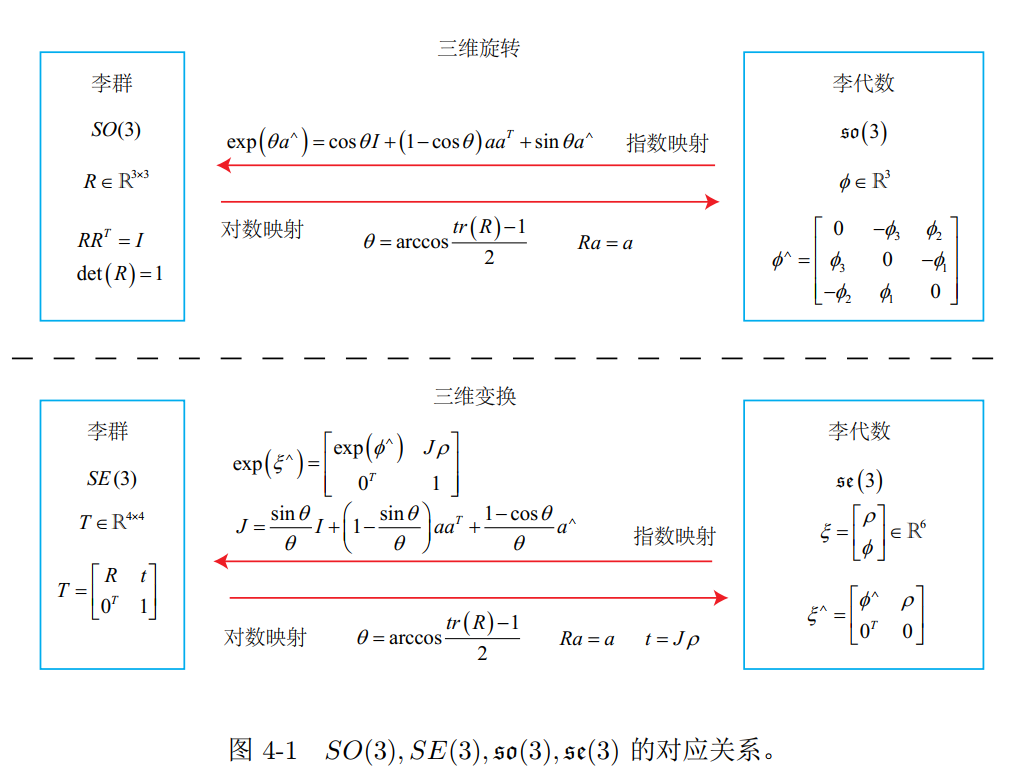
李群和李代数
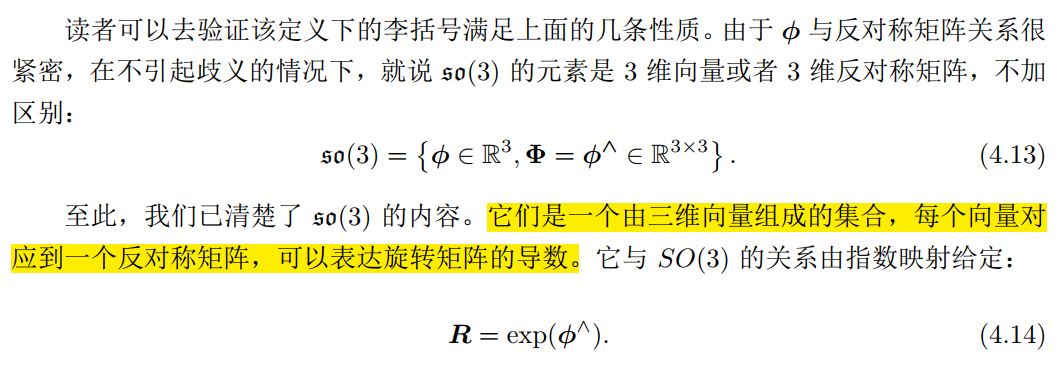
- 给定某时刻的旋转矩阵R,我们就能求得一个 ϕ,它描述了 R 在局部的导数关系。与 R 对应的 ϕ 有什么含义呢?我们说, ϕ 正是对应到 SO(3) 上的李代数 so(3),也就是说,李代数描述了李群的局部性质;
- 其次,给定某个向量ϕ时,矩阵指数 exp(ϕ^) 如何计算?反之,给定R时,能否有相反的运算来计算ϕ?——事实上,这正是李群与李代数间的指数/对数映射
李群 -> 一些矩阵的集合
- 三维旋转矩阵构成了特殊正交群
SO(3),而变换矩阵构成了特殊欧氏群SE(3):- 群(Group)是一种集合加上一种运算的代数结构。我们把集合记作
A,运算记作·,那么群可以记作G = (A; ·)。
- 李群是指具有连续(光滑)性质的群。像整数群 Z 那样离散的群没有连续性质,所以不是李群。而
SO(n)和SE(n),它们在实数空间上是连续的。我们能够直观地想象一个刚体能够连续地在空间中运动,所以它们都是李群- 每个李群都有与之对应的李代数。李代数描述了李群的局部性质,准确地说,是单位元附近的正切空间
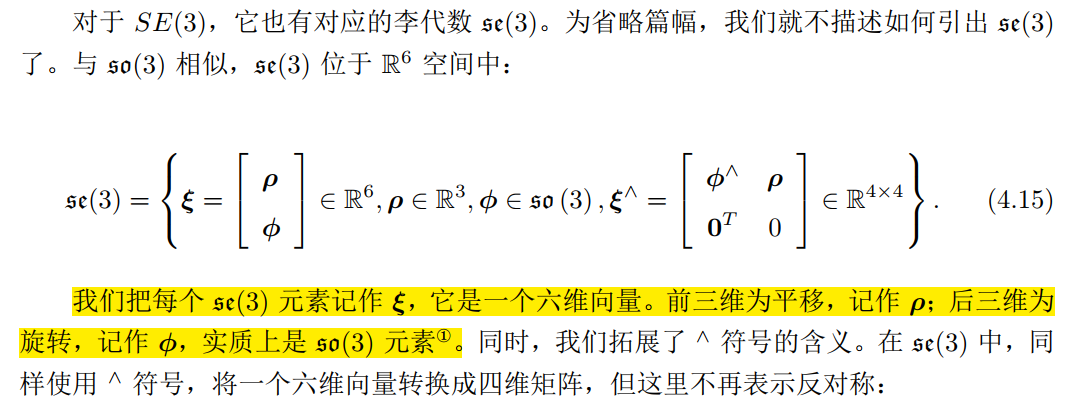
李代数so(3)和李代数 se(3) -> 一些向量组成的集合
so(3)实际上就是由所谓的旋转向量组成的空间
se(3)
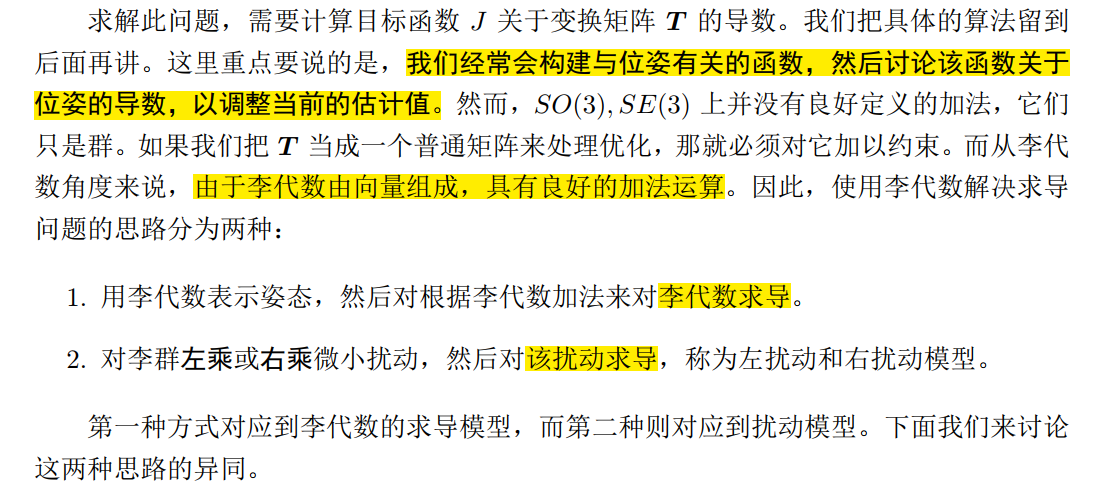
李代数求导和扰动模型
BCH公式
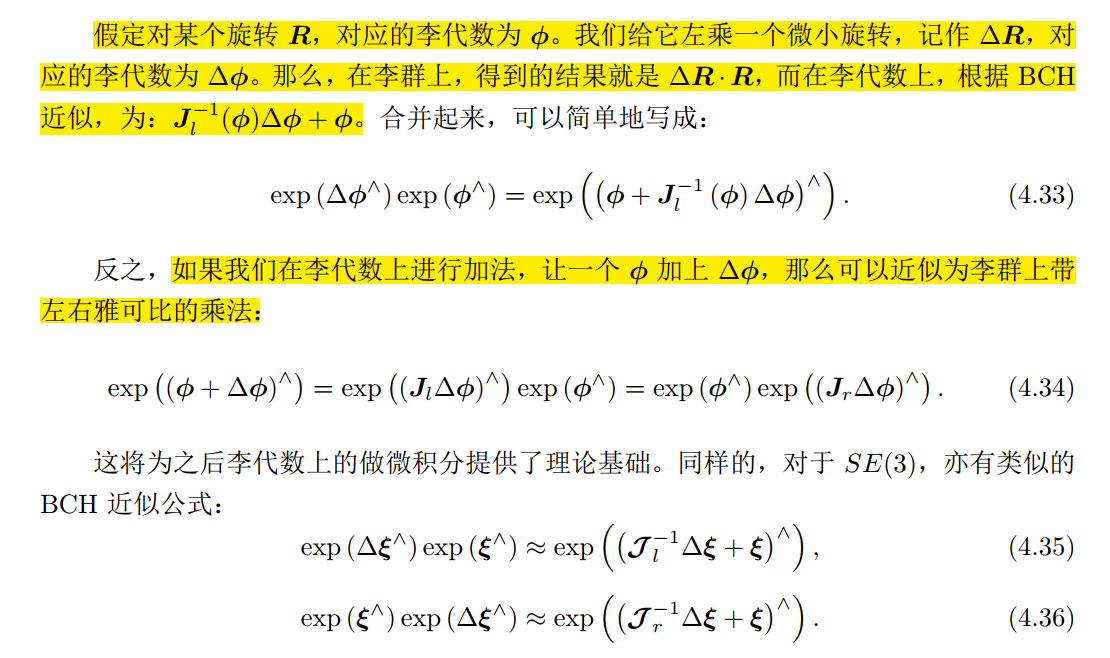
扰动
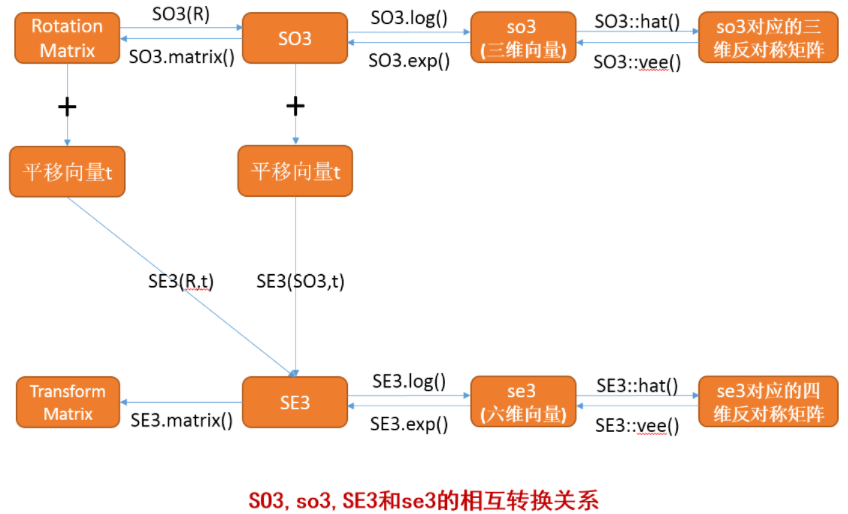
- 李群可通过对数映射获得它的李代数 (Sophus的使用可参考本书代码slambook2/ch4/useSophus.cpp)
SO3,so3,SE3和se3初始化以及相互转换关系
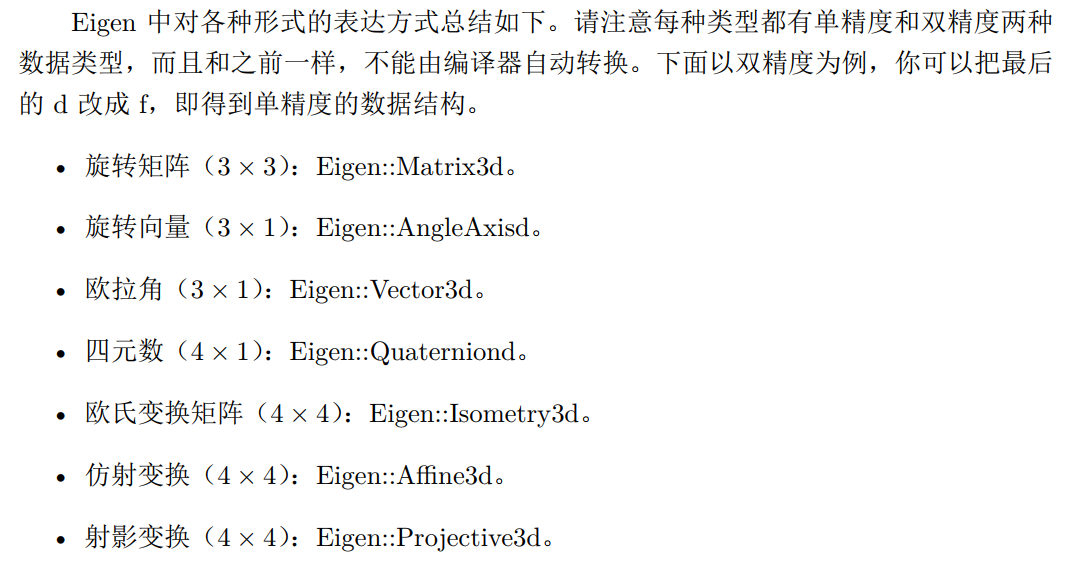
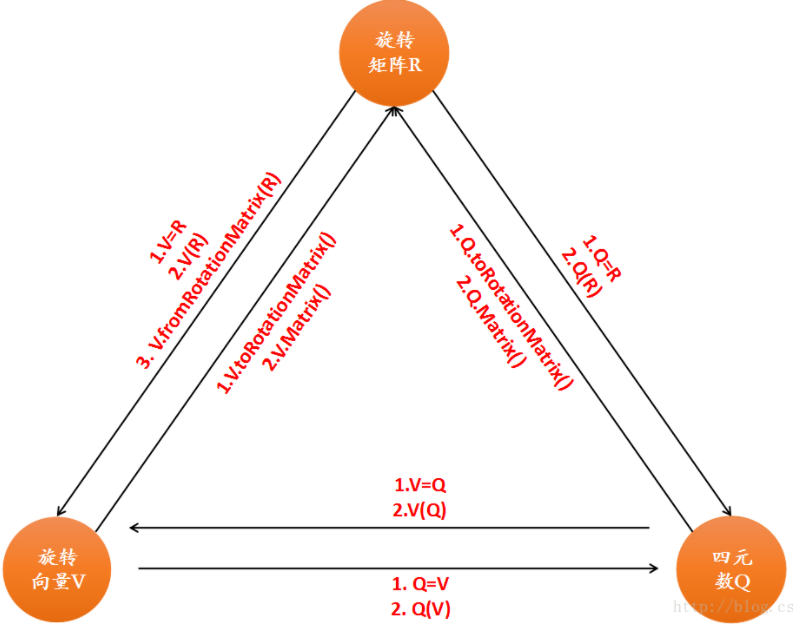
旋转矩阵(R),旋转向量(V)和四元数(Q)在Eigen中转换关系
第五讲
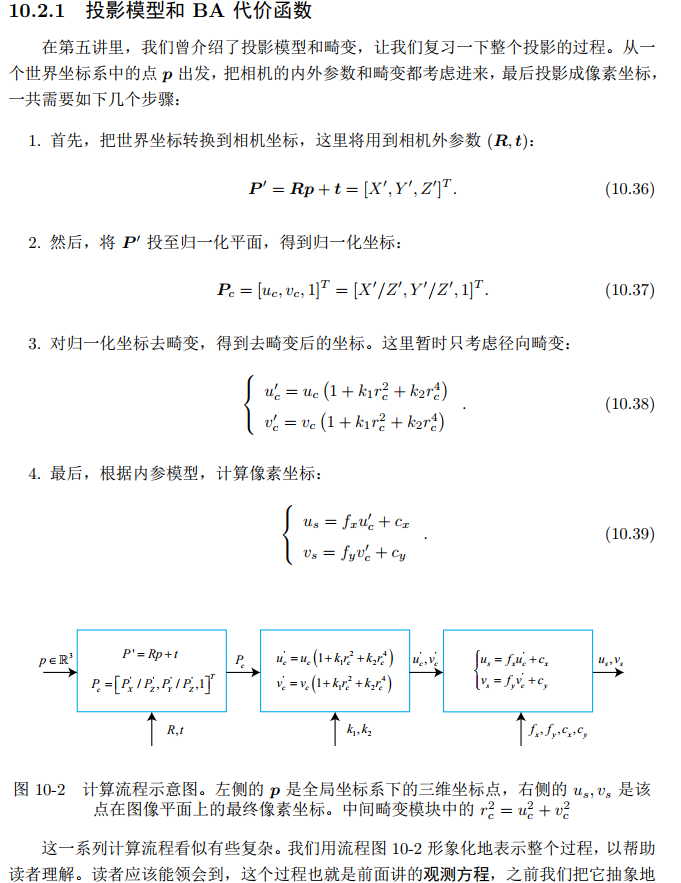
根据 RGB-D 图像和相机内参,我们可以计算任何一个像素在相机坐标系下的位置。同时,根据相机位姿,又能计算这些像素在世界坐标系下的位置。如果把所有像素的空间坐标都求出来,相当于构建一张类似于地图的东西
若有多张RGB-D图像,且知道每个图像的内参(如随相机固定的参数)和外参(如相机位姿信息),则通过求出所有像素的空间信息后,可实现点云拼接
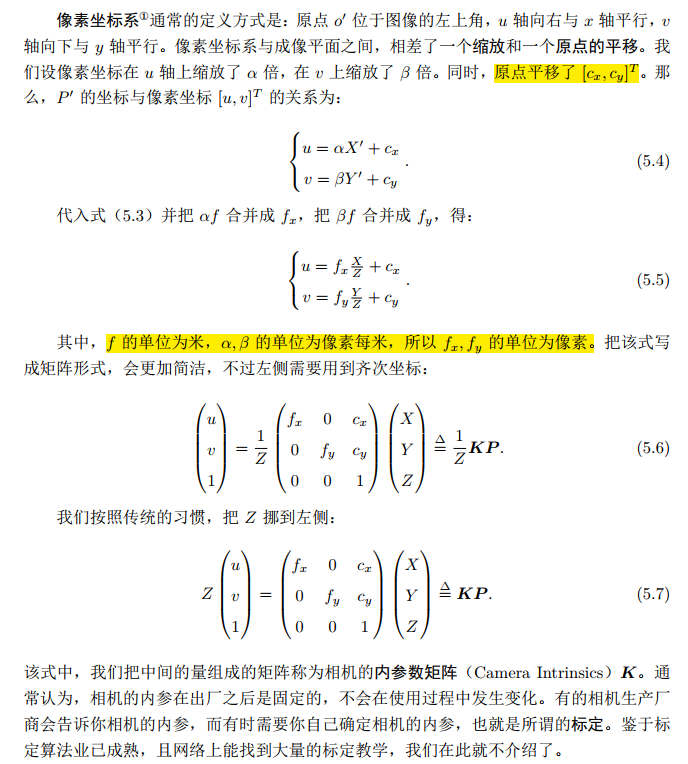
相机内参在出厂后即固定。有些厂商会告诉内参,若没告诉,用标定法即可(已非常成熟)
- 内参的推导可参考5.1.1小节,内参数矩阵中一般包含f_x,f_y (像素)、 c_x,c_y (原点平移)
- 内参的推导可参考5.1.1小节,内参数矩阵中一般包含f_x,f_y (像素)、 c_x,c_y (原点平移)
相机的外参:位姿
R,t(旋转矩阵和平移向量)
第六讲
- 大多现代视觉 SLAM 算法都不需要那么高成本的传感器,甚至也不需要那么昂贵的处理器来计算这些数据,这全是算法的功劳。由于在 SLAM 问题中,同一个点往往会被一个相机在不同的时间内多次观测,同一个相机在每个时刻观测到的点也不止一个。这些因素交织在一起,使我们拥有了更多的约束,最终能够较好地从噪声数据中恢复出我们需要的东西
- SLAM中经常会碰到一些非线性优化问题:由许多个误差项平方和组成的最小二乘问题。在优化该问题时,有两种主要的梯度下降方式:Gauss-Newton 和 Levenberg-Marquardt
- 在做最优化计算时,需要提供变量的初始值(在视觉SLAM中,可用ICP,PnP等方法提供优化初始值)
- 优化库
- 有两个常用的优化库:google的Ceres库和基于图优化的g2o(General Graphic Optimization, G2O)库
- Ceres 库面向通用的最小二乘问题的求解,作为用户,我们需要做的就是定义优化问题,然后设置一些选项,输入进 Ceres 求解即可
- 另一个(主要在 SLAM 领域)广为使用的优化库 g2o是一个基于图优化的库。为了使用 g2o,首先要做的是将问题抽象成图优化。这个过程中,只要记住节点为优化变量,边为误差项即可
- 有两个常用的优化库:google的Ceres库和基于图优化的g2o(General Graphic Optimization, G2O)库
第七讲
特征点
(基于特征点方式的视觉里程计计算法)
特征点:在视觉里程计中,我们希望特征点在相机运动之后仍保持稳定。(如著名的 SIFT, SURF,ORB等)
特征点由关键点(Key-point)和描述子(Descriptor)两部分组成。(比方说,当我们
谈论 SIFT 特征时,是指“提取 SIFT 关键点,并计算 SIFT 描述子”两件事情)。关键点是指该特征点在图像里的位置,有些特征点还具有朝向、大小等信息。描述子通常是一个向量,按照某种人为设计的方式,描述了该关键点周围像素的信息。描述子是按照“外观
相似的特征应该有相似的描述子”的原则设计的SIFT特征点:SIFT(尺度不变特征变换, Scale-Invariant Feature Transform) 当属最为经典的一种。它充分考虑了在图像变换过程中出现的光照,尺度,旋转等变化,但随之而来的是极大的计算量。由于整个 SLAM 过程中,图像特征的提取与匹配仅仅是诸多环节中的一个,所以在 SLAM 中我们_甚少使用_这种“奢侈”的图像特征
FAST关键点: FAST 关键点属于计算特别快的一种特征点(注意这里“关键点”的用词,说明它_没有描述子_)
ORB(Oriented FAST and Rotated BRIEF)特征点:ORB特征则是目前看来非常具有代表性的实时图像特征。它改进了FAST 检测子不具有方向性的问题,并采用速度极快的二进制描述子BRIEF,使整个图像特征提取的环节大大加速。提取 ORB 特征分为两个步骤:
FAST 角点提取:找出图像中的” 角点”。相较于原版的 FAST, ORB 中计算了特征点的主方向,为后续的 BRIEF 描述子增加了旋转不变特性。
- 针对 FAST 角点不具有方向性和尺度的弱点, ORB 添加了尺度和旋转的描述。尺度不变性由构建图像金字塔,并在金字塔的每一层上检测角点来实现。而特征的旋转是由灰度质心法(Intensity Centroid)实现的
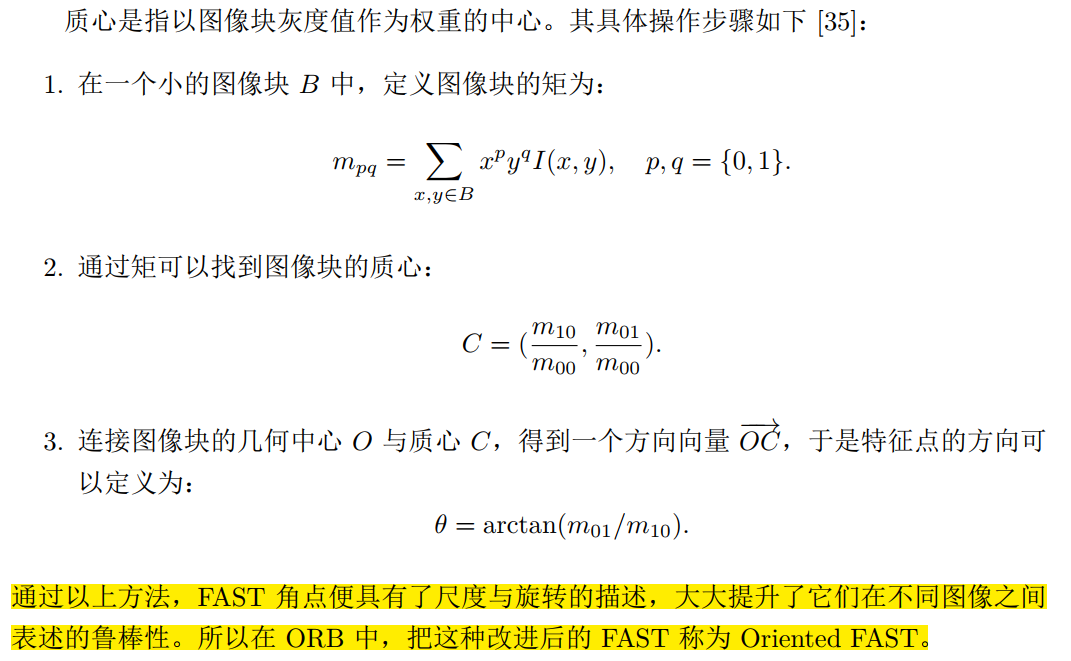
- 针对 FAST 角点不具有方向性和尺度的弱点, ORB 添加了尺度和旋转的描述。尺度不变性由构建图像金字塔,并在金字塔的每一层上检测角点来实现。而特征的旋转是由灰度质心法(Intensity Centroid)实现的
BRIEF 描述子:对前一步提取出特征点的周围图像区域进行描述
- BRIEF 是一种二进制描述子,它的描述向量由许多个 0 和 1 组成,这里的 0 和 1 编码了关键点附近两个像素(比如说 p 和 q)的大小关系:如果 p 比 q 大,则取 1,反之就取 0 (如果我们取了 128 个这样的 p; q,最后就得到 128 维由 0, 1 组成的向量。那么, p和 q 如何选取呢?在作者原始的论文中给出了若干种挑选方法,大体上都是按照某种概率分布,随机地挑选 p 和 q 的位置。 BRIEF 使用了随机选点的比较,速度非常快,而且由于使用了二进制表达,存储起来也十分方便,适用于实时的图像匹配。)
- 原始的 BRIEF 描述子不具有旋转不变性的,因此在图像发生旋转时容易丢失。而 ORB 在 FAST 特征点提取阶段计算了关键点的方向,所以可以利用方向信息,计算了旋转之后的“Steer BRIEF”特征,使 ORB 的描述子具有较好的旋转不变性
由于考虑到了旋转和缩放,使得 ORB 在平移、旋转、缩放的变换下仍有良好的表现。同时, FAST 和 BRIEF 的组合也非常的高效,使得 ORB 特征在实时 SLAM 中非常受欢迎
在提取特征点后,接下来,我们希望根据匹配的点对,估计相机的运动。这里由于相机的原理不同,情况发生了变化:
- 当相机为单目时,我们只知道 2D 的像素坐标,因而问题是根据两组 2D 点估计运动。该问题用对极几何来解决
- 当相机为双目、 RGB-D 时,或者我们通过某种方法得到了距离信息,那问题就是根据两组 3D 点估计运动。该问题通常用 ICP 来解决
- 如果我们有 3D 点和它们在相机的投影位置,也能估计相机的运动。该问题通过PnP求解
2D-2D:对极几何 (7.3节,单目相机)
需要>=8个点对
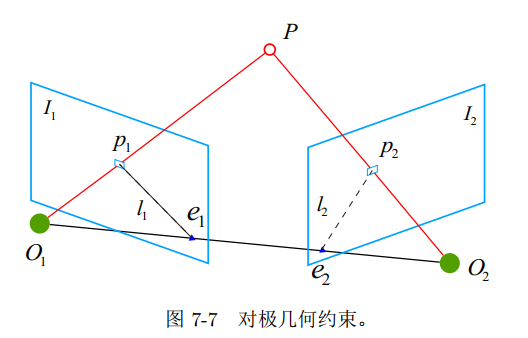
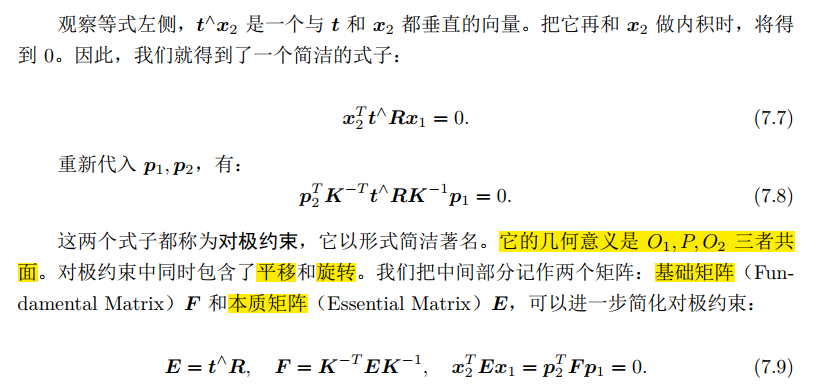
基础矩阵F和本质矩阵E
- 对极约束简洁地给出了两个匹配点的空间位置关系。于是,相机位姿估计问题变为以下两步:
- 根据配对点的像素位置,求出 E 或者 F
- 根据 E 或者 F,求出 R; t
- 由于 E 和 F 只相差了相机内参,而内参在 SLAM 中通常是已知的,所以实践当中 往往使用形式更简单的 E。
- 对极约束简洁地给出了两个匹配点的空间位置关系。于是,相机位姿估计问题变为以下两步:
单应矩阵H
- 除了基本矩阵和本质矩阵,我们还有一种称为单应矩阵(Homography) H 的东西,它描述了两个平面之间的映射关系。若场景中的特征点都落在同一平面上(比如墙,地面等),7.3 2D-2D: 对极几何则可以通过单应性来进行运动估计。这种情况在无人机携带的俯视相机,或扫地机携带的顶视相机中比较常见
- 单应性在 SLAM 中具重要意义。当特征点共面,或者相机发生纯旋转的时候,基础矩阵的自由度下降,这就出现了所谓的退化(degenerate)。现实中的数据总包含一些噪声,这时候如果我们继续使用八点法求解基础矩阵,基础矩阵多余出来的自由度将会主要由噪声决定。为了能够避免退化现象造成的影响,通常我们会同时估计基础矩阵 F 和单应矩阵H,选择重投影误差比较小的那个作为最终的运动估计矩阵
在经过特征点匹配后,
slambook2/ch7/pose_estimation_2d2d.cpp文件使用匹配好的特征点来计算本质矩阵E; F 和 H,进而分解 E 得相机的位姿R; t。(从 E; F 和 H 都可以分解出运动,不过 H 需要假设特征点位于平面上,(而本实验特征点不在同一平面),所以我们这里主要用E 来分解运动。)在单目SLAM中,仅通过单张图像无法获得像素的深度信息,但有多张图像时,可通过三角测量的方法获得像素深度
slambook/ch7/triangulation.cpp- 在增大平移,会导致匹配失效;而平移太小,则三角化精度不够——这就是三角化的矛盾
3D-2D:PnP (7.7节,双目或 RGB-D 相机)
- 需要>=3个点对,以及一个额外点按验证结果
PnP(Perspective-n-Point)
PnP(Perspective-n-Point)是求解 3D 到 2D 点对运动的方法。它描述了当我们知道n 个 3D 空间点以及它们的投影位置时,如何估计相机所在的位姿。前面已经说了, 2D-2D的对极几何方法需要八个或八个以上的点对(以八点法为例),且存在着初始化、纯旋转和尺度的问题。然而,如果两张图像中,其中一张特征点的 3D 位置已知,那么最少只需三个点对(需要至少一个额外点验证结果)就可以估计相机运动。特征点的 3D 位置可以由三角化,或者由 RGB-D 相机的深度图确定。因此,在双目或 RGB-D 的视觉里程计中,我们可以直接使用 PnP 估计相机运动。而在单目视觉里程计中,必须先进行初始化,然后才能使用 PnP。 3D-2D 方法不需要使用对极约束,又可以在很少的匹配点中获得较好的运动估计,是最重要的一种姿态估计方法
PnP 问题有很多种求解方法,例如用三对点估计位姿的 P3P,直接线性变换(DLT),EPnP(Efcient PnP) 等等。此外,还能用非线性优化的方式,构建最小二乘问题并迭代求解,也就是万金油式的 Bundle Adjustment。我们先来看 DLT,然后再讲 Bundle Adjustment
P3P
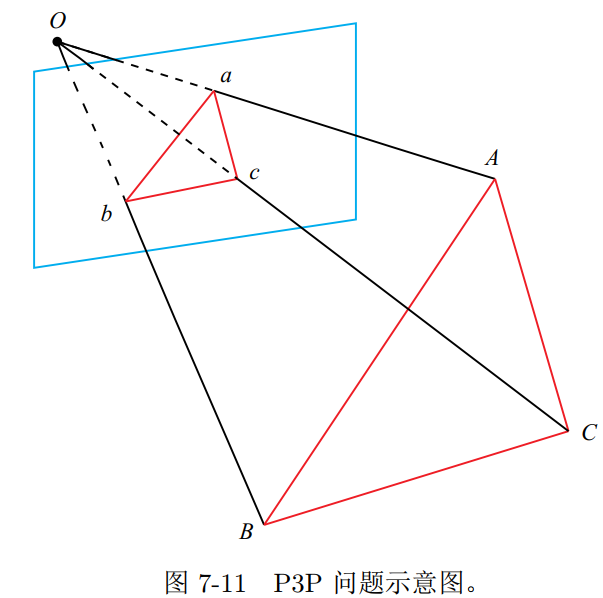
P3P 需要利用给定的三个点的几何关系。它的输入数据为三对 3D-2D 匹配点。记 3D点为 A; B; C, 2D 点为 a; b; c,其中小写字母代表的点为大写字母在相机成像平面上的投影,如图 7-11 所示。此外, P3P 还需要使用一对验证点,以从可能的解出选出正确的那一个(类似于对极几何情形)。记验证点对为 D − d,相机光心为 O。请注意,我们知道的是A; B; C 在世界坐标系中的坐标,而不是在相机坐标系中的坐标。一旦 3D 点在相机坐标系下的坐标能够算出,我们就得到了 3D-3D 的对应点,把 PnP 问题转换为了 ICP 问题
- 从 P3P 的原理上可以看出,为了求解 PnP,我们利用了三角形相似性质,求解投影点 a; b; c 在相机坐标系下的 3D 坐标
- 最后把问题转换成一个 3D 到 3D 的位姿估计问题
Bundle Adjustment (可参考第九讲)
除了使用线性方法之外,我们可以把 PnP 问题构建成一个关于重投影误差的非线性最小二乘问题。前面说的线性方法,往往是先求相机位姿,再求空间点位置,而非线性优化则是把它们都看成优化变量,放在一起优化。这是一种非常通用的求解方式,我们可以用它对 PnP 或 ICP 给出的结果进行优化。这一类把相机和三维点放在一起进行最小化的问题,统称为Bundle Adjustment。
3D-3D: ICP (Iterative Closest Point)
- 根据配对好的3D点估计相机的运动(已由图像特征给定了匹配的情况下进行位姿估计的问题)
在RGB-D SLAM 中,由于一个像素的深度数据可能测量不到,所以我们可以混合着使用 PnP和 ICP 优化:对于深度已知的特征点,建模它们的 3D-3D 误差;对于深度未知的特征点,则建模 3D-2D 的重投影误差。于是,可以将所有的误差放在同一个问题中考虑,使得
求解更加方便
对极几何->PnP->ICP,在这个过程中我们使用了越来越多的信息(没有深度—>有一个图的深度—>有两个图的深
度),因此,在深度准确的情况下,得到的估计也将越来越准确
小结
本节介绍了基于特征点的视觉里程计中的几个重要的问题。包括:
- 特征点是如何提取并匹配的;
- 如何通过 2D-2D 的特征点估计相机运动;
- 如何从 2D-2D 的匹配估计一个点的空间位置;
- 3D-2D 的 PnP 问题,它的线性解法和 Bundle Adjustment 解法;
- 3D-3D 的 ICP 问题,其线性解法和 Bundle Adjustment 解法
第八讲
直接法的引出
在视觉里程计中,除了可以用特征点法,还可以用直接法
我们看到使用特征点确实存在一些问题。有没有什么办法能够克服这些缺点呢?我们有以下几种思路:
- 保留特征点,但只计算关键点,不计算描述子。同时,使用光流法(Optical Flow)来跟踪特征点的运动。这样可以回避计算和匹配描述子带来的时间,但光流本身的计算需要一定时间
- 只计算关键点,不计算描述子。同时,使用直接法(Direct Method)来计算特征点在下一时刻图像的位置。这同样可以跳过描述子的计算过程,而且直接法的计算更加简单
第一种方法仍然使用特征点,只是把匹配描述子替换成了光流跟踪,估计相机运动时仍使用对极几何、 PnP 或 ICP 算法。而在直接法中,我们会根据图像的像素灰度信息来计算相机运动。
使用特征点法估计相机运动时,我们把特征点看作固定在三维空间的不动点。根据它们在相机中的投影位置,通过最小化重投影误差(Reprojection error)来优化相机运动。在这个过程中,我们需要精确地知道空间点在两个相机中投影后的像素位置——这也就是我
们为何要对特征进行匹配或跟踪的理由。同时,我们也知道,计算、匹配特征需要付出大量的计算量。相对的,在直接法中,我们并不需要知道点与点之间之间的对应关系,而是通过最小化光度误差(Photometric error)来求得它们。
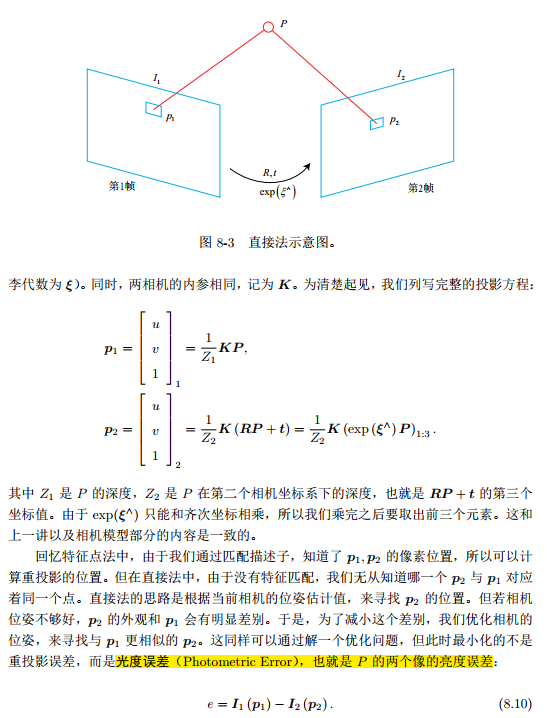
直接法的推导
- 我们的目标是求第一个相机到第二个相机的相对位姿变换

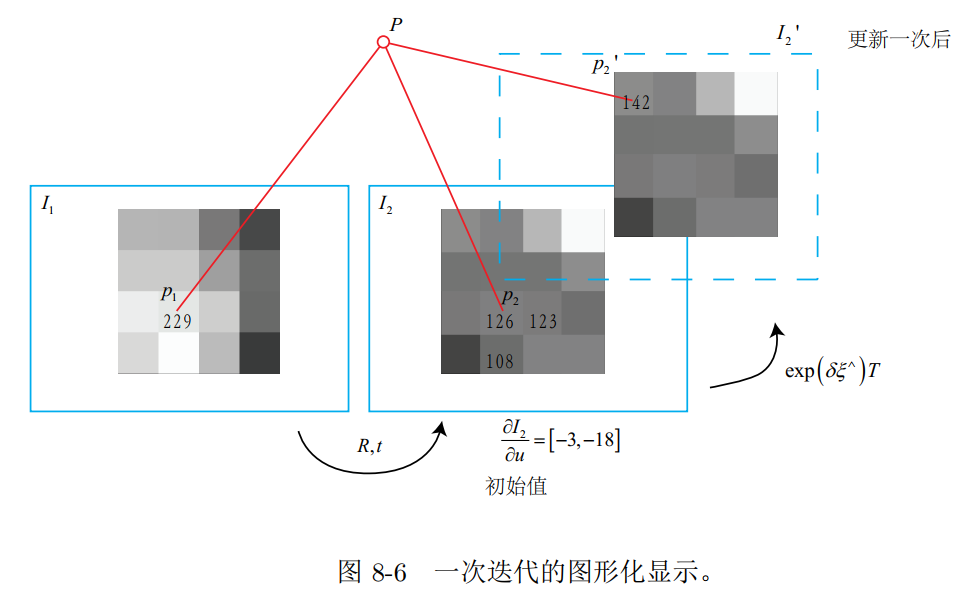
相比于特征点法,直接法完全依靠优化来求解相机位姿。像素梯度引导着优化的方向。如果我们想要得到正确的优化结果,就必须保证大部分像素梯度能够把优化引导到正确的方向。
- 原理解释(通俗易懂)

- 优缺点
前端视觉里程计能给出一个短时间内的轨迹和地图,但由于不可避免的误
差累积,这个地图在长时间内是不准确的。所以,在视觉里程计的基础上,我们还希望构
建一个尺度、规模更大的优化问题,以考虑长时间内的最优轨迹和地图。不过,考虑到精
度与性能的平衡,实际当中存在着许多不同的做法。
第九讲:后端1
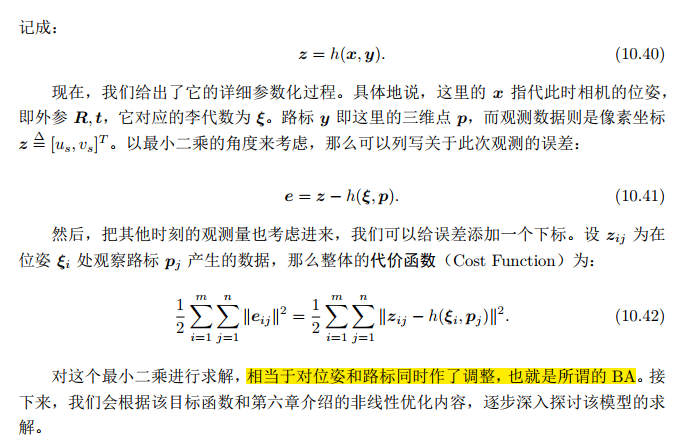
- Bundle Adjustment (BA)
所谓的 BundleAdjustment,是指从视觉重建中提炼出最优的 3D 模型和相机参数(内参数和外参数)。
从每一个特征点反射出来的几束光线(bundles of light rays),在我们把相机姿态和特征点空间位置做出最优的调整 (adjustment) 之后,最后收束到相机光心的这个过程,简称为 BA。
第十讲
SLAM的主体(前端、后端)主要的目的在于估计相机运动:前端提供特征点的提取和轨迹、地图的初值,而后端负责对所有这些数据进行优化。
第十一讲:回环检测
- 回环检测模块,能够给
出除了相邻帧之外的,一些时隔更加久远的约束:例如 x1 − x100 之间的位姿变换。为什
么它们之间会有约束呢?这是因为我们察觉到相机经过了同一个地方, 采集到了相似的数
据。而回环检测的关键,就是如何有效地检测出相机经过同一个地方这件事。如果我们能
够成功地检测这件事,就可以为后端的 Pose Graph 提供更多的有效数据,使之得到更好
的估计,特别是得到一个全局一致(Global Consistent)的估计 - 回环检测对于 SLAM 系统意义重大。它关系到我们估计的轨迹和地图在长时间下的正确性。另一方面,由于回环检测提供了当前数据与所有历史数据的关联,在跟踪算法丢失之后,我们还可以利用回环检测进行重定位。因此,回环检测对整个 SLAM 系统精度与
鲁棒性的提升,是非常明显的。甚至在某些时候,我们把仅有前端和局部后端的系统称为
VO,而把带有回环检测和全局后端的称为 SLAM
第十二讲:建图
- 在适用范围内, RGB-D 相机是一种更好的
选择。在 RGB-D 相机中可以完全通过传感器中硬
件测量得到,无需消耗大量的计算资源来估计它们。并且, RGB-D 的结构光或飞时原理,
保证了深度数据对纹理的无关性。即使面对纯色的物体,只要它能够反射光,我们就能测
量到它的深度。这亦是 RGB-D 传感器的一大优势。 - 利用 RGB-D 进行稠密建图是相对容易的。不过,根据地图形式不同,也存在着若干
种不同的主流建图方式。最直观最简单的方法,就是根据估算的相机位姿,将 RGB-D 数
据转化为点云(Point Cloud),然后进行拼接,最后得到一个由离散的点组成的点云地图
(Point Cloud Map)。在此基础上,如果我们对外观有进一步的要求,希望估计物体的表面,
可以使用三角网格(Mesh),面片(Surfel)进行建图。另一方面,如果希望知道地图的障
碍物信息并在地图上导航,亦可通过体素(Voxel)建立占据网格地图(Occupancy Map)。
配置ORB-SLAM2
- pangolin
根据官网安装required and Recommended dependencies。然后编译文件
cd Pangolin
mkdir build
cd build
cmake ..
make
sudo make installcd opencv-3.4.15
mkdir build
cd build
cmake ..
make
sudo make installEigen3
- 使用
sudo apt-get install libeigen3-dev
- 使用
ORB-SLAM2
- 报错:error: usleep is not declared this scope。其解决方法: 只需在/include/System.h文件中添加头文件#include <unistd.h>即可
在ORB-SLAM2中新建文件夹DataDownload,将数据下载到该文件夹下并解压。用官网的命令行来运行程序
SLAM
- SLAM中Jacobian矩阵的表达形式,其他参考
- 2*3的三维点表达
- 2*6的相机位姿表达
- 相机之间添加约束时的Hessian及边缘化过程
- VSLAM之边缘化 Marginalization 和 FEJ (First Estimated Jocobian)
- SLAM中的marginalization 和 Schur complement




